
The Golem Project
Hod Lipson and Jordan B. Pollack

|
|
|
|
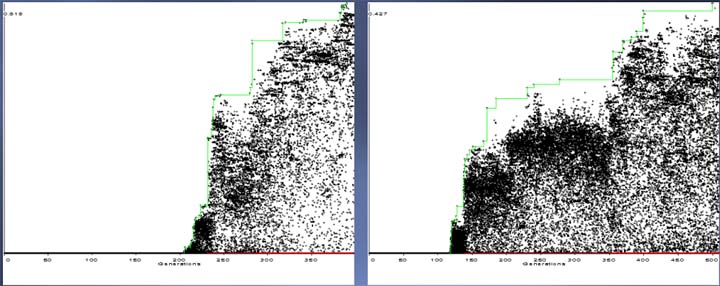
The machines and tasks we described in this work are fairly simple from the perspective of what human teams of engineers can produce, and what biological evolution has produced. The hard question remains: will this process progress beyond toys to more complex machines? The graphs below show how fitness of creatures progresses over the generations. The horizontal axis counts generations, and the vertical axis measures fitness (locomotion distance, in this case). Each dot is an individual being born. It is evident that the progress rate becomes slower as the fitness becomes higher. This rate slowdown is enhanced by the fact that evaluation time also increases as machines become more complex. Also, looking at individuals that are generated after many generations, we see highly coupled mechnisms that are difficult to improve on.
There are several approaches to the question of sustained evolution. We are exploring these alternatives:
|
Copyright (c) 2000 Lipson & Pollack |
lipson@cs.brandeis.edu |
Updated |