hornby@cs.brandeis.edu
Dynamic & Evolutionary Machine Organization Lab
|
|
Gregory S. Hornby hornby@cs.brandeis.edu Dynamic & Evolutionary Machine Organization Lab |
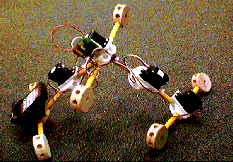
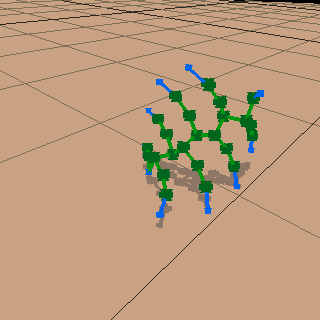
Here we evolve both the morphology and the controllers for different robots. The system for generating designs consists of the design builder and simulator, the L-system module and the evolutionary algorithm. The design builder takes a decoded build sequence and generates a robot and controller. Once built, the robot's movement is simulated for a fixed amount of time and evaluated for distance. This distance is the basis of a fitness function for the evoluationary algorithm to evolve the L-systems.
 gbot_kayak.avi (8.8M) |
 gbot_quatro1.mov (600k) |
 gbot_quatro1.mov (600k) |
 |
 |
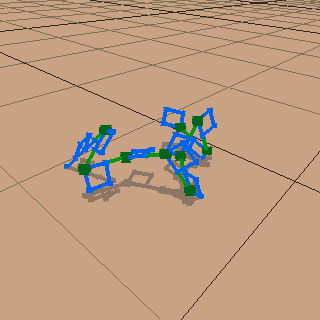
 Rolling Cloverleafs (1.7M) |
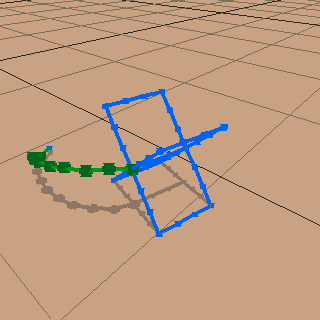
 Undulating Serpent (1.7M) |
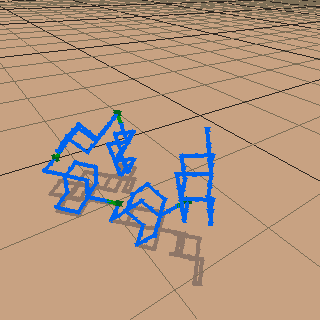
 Rolling Rectangles (2.2M) |
 (5.8M) |
 (5.8M) |
 (5.8M) |
 (5.8M) |
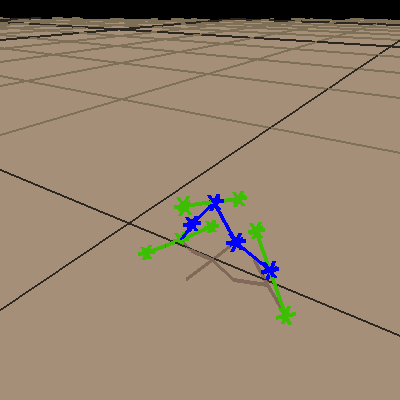 Kayaker |
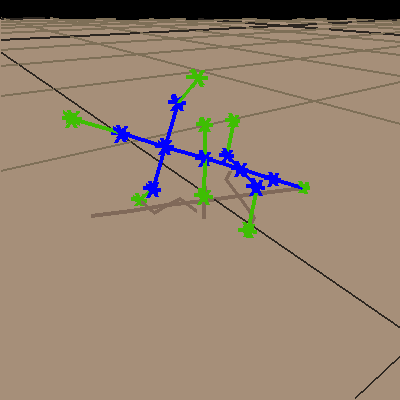 Twister |
 M |
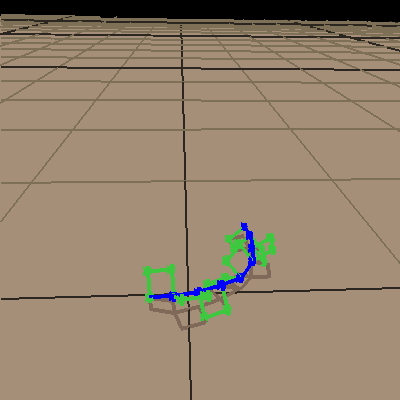 Paddlewheel Roller |
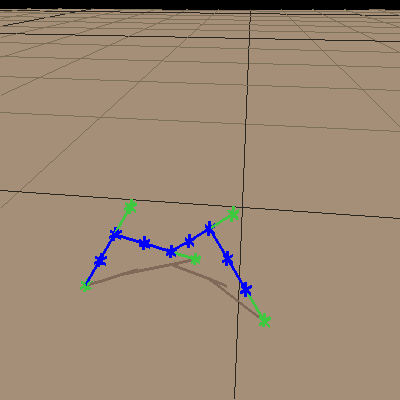
 An Inchworm with stabilizing arms. |
 Rolling Tree |
| Homepage. | Research Projects. | Encoding for Automated Design | Publications. |
| hornby@cs.brandeis.edu - Last modified: June 12, 2003 |
Copyright © Gregory Hornby |