hornby@cs.brandeis.edu
Dynamic & Evolutionary Machine Organization Lab
|
|
Gregory S. Hornby hornby@cs.brandeis.edu Dynamic & Evolutionary Machine Organization Lab |
| One of the issues with legged robots is the development of gaits. Typically gaits are developed manually, which is a slow and tedious process. In this project we report our results of autonomous evolution of dynamic gaits for the Sony Entertainment Robot, AIBO and its prototype. Fitness is determined using the robot's digital camera and infrared sensors. Evolved gaits are faster than those created by hand. Using this technique we evolve a gait used in the consumer version of AIBO. |
 |
|
 |
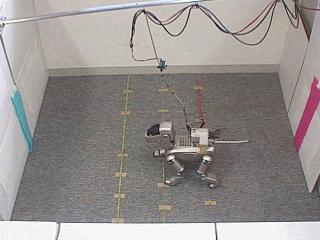 |
Using our evolutionary algorithms we successfully evolved various dynamic gaits for Sony's OPEN-R prototype robot and Sony's ERS-110 robot. One of the dynamic gaits evolved on the ERS-110 is used on the first consumer version of AIBO.
Here are .AVI videos of our experiments:|
Evolving on a flat surface.
|
Evolving with ridges (to improve robustness).
|
|
Results from evolution on a flat surface. Notice the stumbling when gait is tried on a different AIBO.
|
Results from evolution on a surface with ridges. Gait works well on a different AIBO.
|
| Homepage. | Research Projects. | Publications. |
| hornby@cs.brandeis.edu - Last modified: June 12, 2003 |
Images & Animations
Copyright © Gregory Hornby |