
The Golem Project
Hod Lipson and Jordan B. Pollack

|
|
|
|
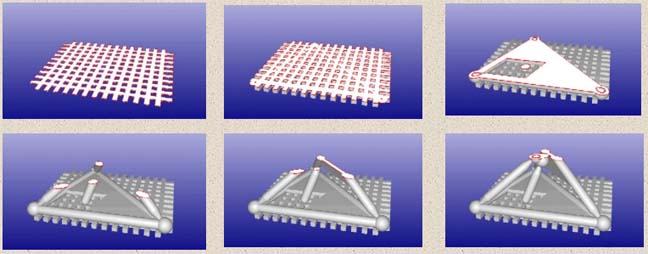
Selected robots out of those with winning performance were then automatically replicated into reality. The manufacturing process uses comercial rapid-prototyping technology ("3D Printing"), which generates the entire structure layer by layer.
|
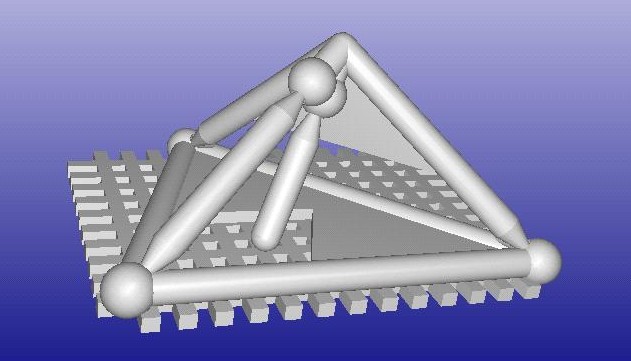
The bodies, which exist only as points and lines, were first converted into a solid model with ball-joints and accommodations for linear motors according to the evolved design. This solidifying stage was performed by a automatic program which combined pre-designed components describing a generic bar, ball joint, and actuator. View VRML model of a fleshed robot |
  |
|
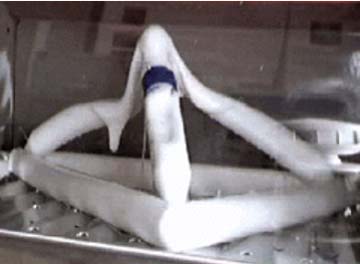
The virtual solid bodies were then materialized using commercial rapid prototyping technology. Plastic deposition 3D printing machines use a temperature-controlled head to extrude thermoplastic material layer by layer, so that the arbitrarily evolved morphology emerged as a solid three-dimensional structure without tooling or human intervention. See some videos of 3D printing: |
  |
|
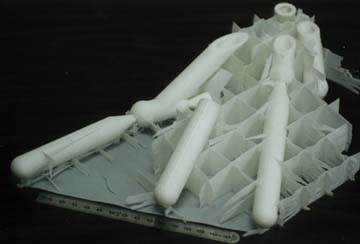
The entire pre-assembled machine was printed as a single unit, with fine plastic supports connecting between moving parts; these supports broke away at first motion. See high-resolution image. |
 |
|
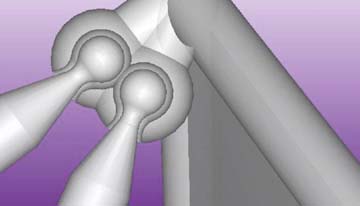
The resulting structures contained complex joints that would be difficult to design or manufacture using traditional methods. See high-resolution image. |
 |
|
The evolved controller (neural net) is downloaded into a PIC microcontroller. Standard stepper motors are then snapped in, and the evolved neural network is executed on a microcontroller to activate the motors. |
 |
|
After the robot performs, it can be melted and recycled into another form for the next task. To see a video of the meltdown process, click here [1.8MB]. In practice, we do not actually recycle the material so as not to damage the printer. What we really want to do in the future, is reverse the melting... |
 |
Click here to see some results.
Check our webcam to see what the printer is printing now.
|
Copyright (c) 2000 Lipson & Pollack |
lipson@cs.brandeis.edu |
Updated |
{kind=link}