hornby@cs.brandeis.edu
Dynamic & Evolutionary Machine Organization Lab
|
|
Gregory S. Hornby hornby@cs.brandeis.edu Dynamic & Evolutionary Machine Organization Lab |
|
This project addresses the problem of creating controllers
for robots, for which there are three sets of experiments: |
|
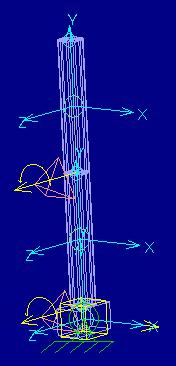
The objective of this set of experiments is to evolve a controller for the slider to balance the pole(s) when random forces are applied to the pole. Two sets of controllers are evolved. The first set of controllers are evolved to balance one pole resting on a cart. Here the character being controlled is the cart and it must move to keep the pole upright. This is to show that one-pole balancing is readily solveable. The second set of controllers are evolved to balance two poles, one on top of the other. This is a highly chaotic problem. By starting with a stiff spring-joint connecting the two poles the problem is like one-pole balancing. As balancers are evolved the spring is relaxed.
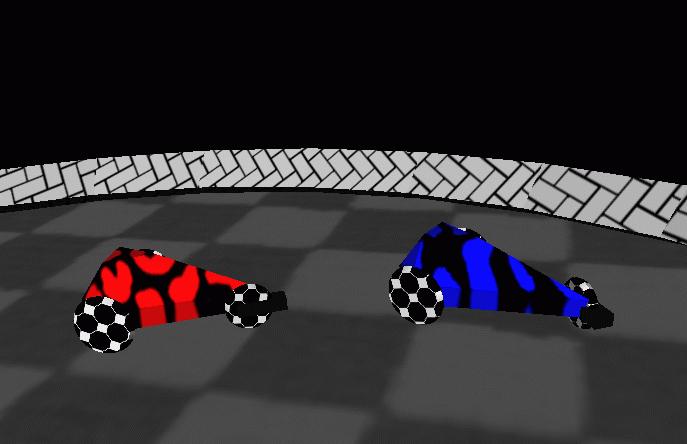
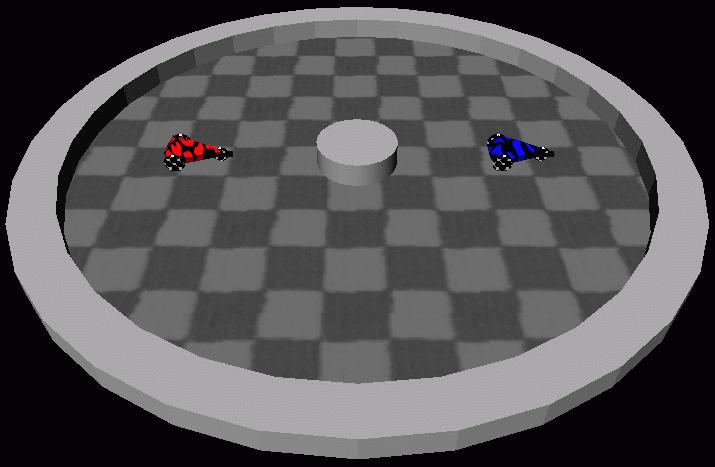
In some situations evolving against a static fitness function has its limitations: in general you can only evolve a solution as good as your fitness function. One way to achieve open-ended evolution is to evaluate individuals by comparing them against other individuals. In this way the system provides steadily increasing challenges to itself thereby enabling more open-ended evolution.
|
|
|
In this project two different types of co-evolutionary
tournaments were compared.
Here is a video presentation of this work:
|
2.2M MPEG |
3.8M Quicktime |
 In simulation. |
 On an actual AIBO. |
|
Ball-chasing in simulation #1 (1.2M MPEG). Ball-chasing in simulation #2 (2.0M MPEG). |
Ball-chasing on AIBO (3.1M AVI). |
The system (evolutionary algorithm, neural network module and simulator) used for this set of experiments is available under the Gnu Public License from this web page.
| Homepage. | Research Projects. | Publications. |
| hornby@cs.brandeis.edu - Last modified: June 12, 2003 |
Images & Animations
Copyright © Gregory Hornby |